How to create a local coordinate system and show it? We define the local coordinate system has its own x-axis, y-axis, z-axis, and origin.
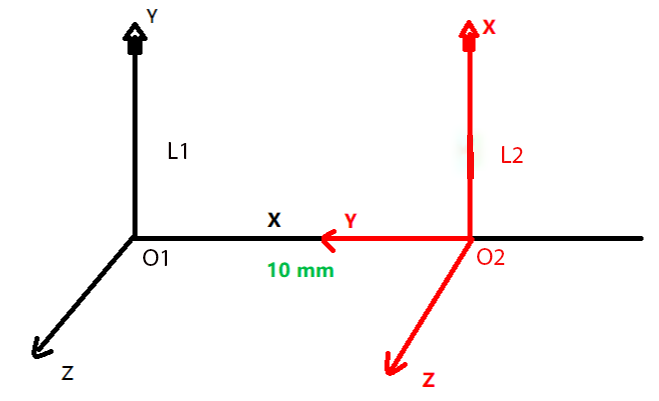
We call the left coordinate system L1 and the right coordinate system L2.
Regard L1 as the world coordinate system in VTK, the other one L2 is a local coordinate system.
Define a vector W.
![\[W = \begin{pmatrix} x \\ y \\ z \\ \end{pmatrix}\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-63f902537fccb7f75aea0a441295df36_l3.png "Rendered by QuickLaTeX.com")
We want to know the new expression V in the coordinate system L2.
Create a matrix transformation equation.
![\[T W = V\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-668b5041e3965bd9cc50135a0e4fdf47_l3.png "Rendered by QuickLaTeX.com")
The matrix T can help us to convert W to the new expression in the coordinate system L2, we call T local coordinate matrix.
How to show the local coordinate system if we don’t know its status before?
The question is equal to compute the expression of E that a unit vector in L2 in the world coordinate system.
So we have the following equation.
![\[TW = E\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-b57bbe31811ebd906cdf28e844694acc_l3.png "Rendered by QuickLaTeX.com")
![\[W = T^{-1} E\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-150c598f2f0c82dba55edda47870b4be_l3.png "Rendered by QuickLaTeX.com")
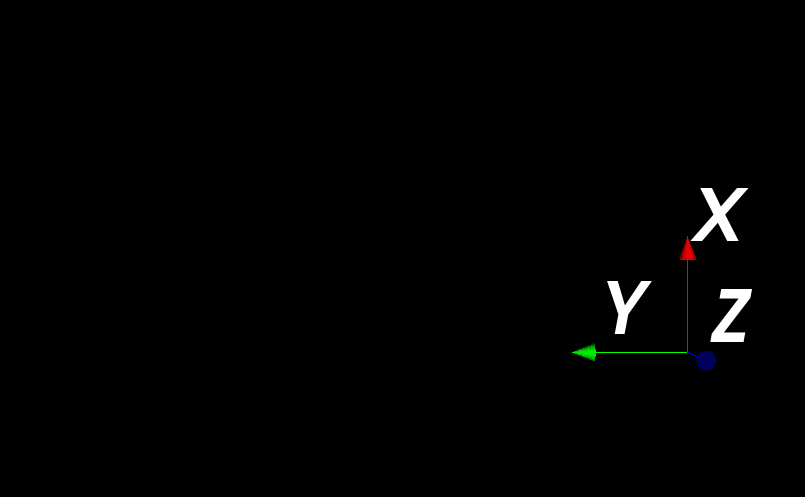
We can apply the  to a vtkAxesActor object to show the local coordinate system.
to a vtkAxesActor object to show the local coordinate system.
Let’s call the matrix pose coordinate matrix.
vtkSmartPointer<vtkTransform> CreateLocalTrans(PointStruct origin, PointStruct xDir, PointStruct yDir)
{
vtkSPtrNew( resultTrans, vtkTransform );
PointStruct zDir = xDir ^ yDir;
zDir.Unit();
double elements1[16] = { xDir[0], xDir[1], xDir[2], 0,
yDir[0], yDir[1], yDir[2], 0,
zDir[0], zDir[1], zDir[2], 0,
0, 0, 0, 1 };
resultTrans->Concatenate(elements1); //rotation
double elements2[16] = { 1, 0, 0, -origin[0],
0, 1, 0, -origin[1],
0, 0, 1, -origin[2],
0, 0, 0, 1 };
resultTrans->Concatenate(elements2); //translation
resultTrans->Update();
return resultTrans;
}
int main()
{
vtkSmartPointer<vtkTransform> local1 =
CreateLocalTrans( PointStruct(0, 0, 0), PointStruct(1, 0, 0), PointStruct(0, 1, 0) );
vtkSmartPointer<vtkTransform> local2 =
CreateLocalTrans( PointStruct(10, 0, 0), PointStruct(0, 1, 0), PointStruct(-1, 0, 0) );
vtkSPtrNew(m1, vtkMatrix4x4);
m1->DeepCopy( local1->GetMatrix() );
vtkSPtrNew(m2, vtkMatrix4x4);
m2->DeepCopy( local2->GetMatrix() );
m1->Invert();
vtkSPtrNew(T, vtkMatrix4x4);
vtkMatrix4x4::Multiply4x4( m2, m1, T );
T->Print( std::cout );
vtkSPtrNew(TTrans, vtkTransform);
TTrans->SetMatrix( T );
TTrans->Inverse();
vtkSmartPointer<vtkAxesActor> axesActor =
vtkSmartPointer<vtkAxesActor>::New();
axesActor->SetUserTransform( TTrans );
vtkSmartPointer<vtkRenderer> renderer =
vtkSmartPointer<vtkRenderer>::New();
renderer->AddActor( axesActor );
renderer->SetBackground( 0, 0, 0 );
vtkSmartPointer<vtkRenderWindow> renderWindow =
vtkSmartPointer<vtkRenderWindow>::New();
renderWindow->AddRenderer( renderer );
vtkSmartPointer<vtkRenderWindowInteractor> renderWindowInteractor =
vtkSmartPointer<vtkRenderWindowInteractor>::New();
renderWindowInteractor->SetRenderWindow( renderWindow );
renderer->ResetCamera();
renderWindow->Render();
renderWindowInteractor->Start();
Now let’s regard L1 as a local coordinate system and explore the transform matrix A.
![\[A L_1 W = L_2 W\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-c5ded3b0f4e7ad325d8cdce11f7b3b79_l3.png "Rendered by QuickLaTeX.com")
 means the new expression of
means the new expression of W in the local coordinate system  .
.
There is a transform matrix A that can help us to describe a vector or point in  by system .
by system .
We can calculate the value of  and apply it.
and apply it.
![\[\begin{pmatrix} 0 & 1 & 0 &0 \\ -1 & 0 & 0 & 10 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} = \begin{pmatrix} y \\ -x + 10 \\ z \\ 1 \end{pmatrix}\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-e7885eded8c7e43d4424469a5f72f301_l3.png "Rendered by QuickLaTeX.com")
Split the matrix to rotate matrix and translate matrix.
Rotate matrix:
![\[\begin{pmatrix} 0 & 1 & 0 \\ -1 & 0 & 0 \\ 0 & 0 & 1 \end{pmatrix}\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-132ccc0ebf38c337e3bc1883cf2d9503_l3.png "Rendered by QuickLaTeX.com")
Translate vector:
![\[\begin{pmatrix} 0 \\ 10 \\ 0 \end{pmatrix}\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-21672199363f8c5905515b47ef2f6295_l3.png "Rendered by QuickLaTeX.com")
We can find that the translate vector starts from system to system , it is described by system because we rotate firstly, and then move it to get the system .



{kind=link}