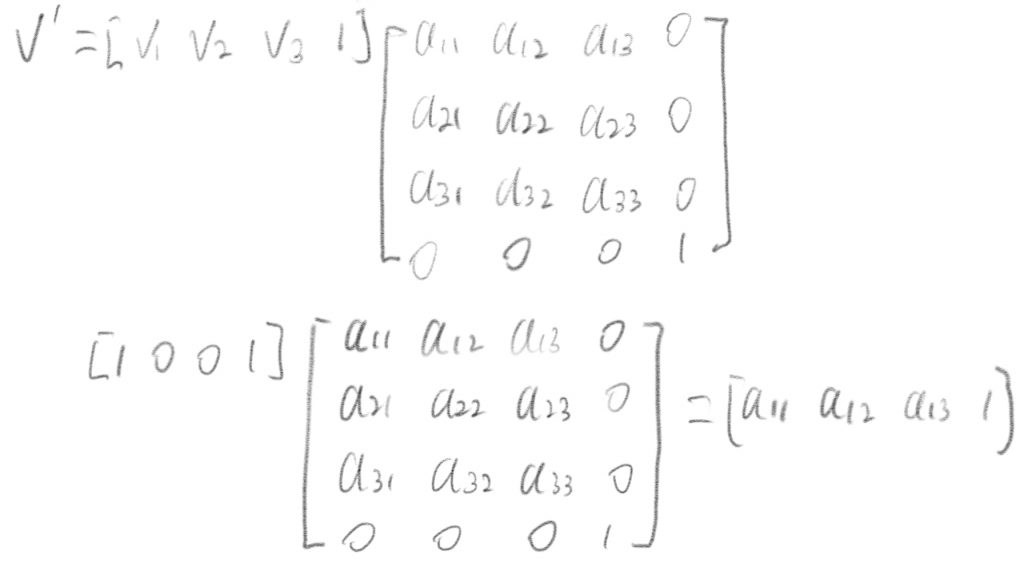
Rotate about z-axis by the angle theta.
Verification:
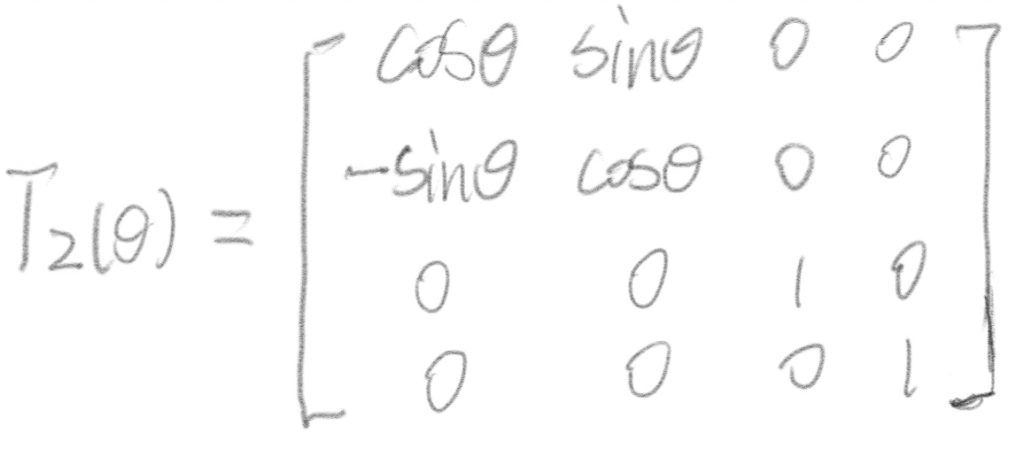
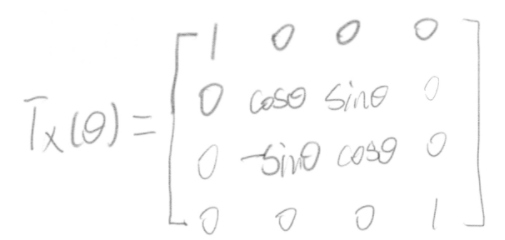
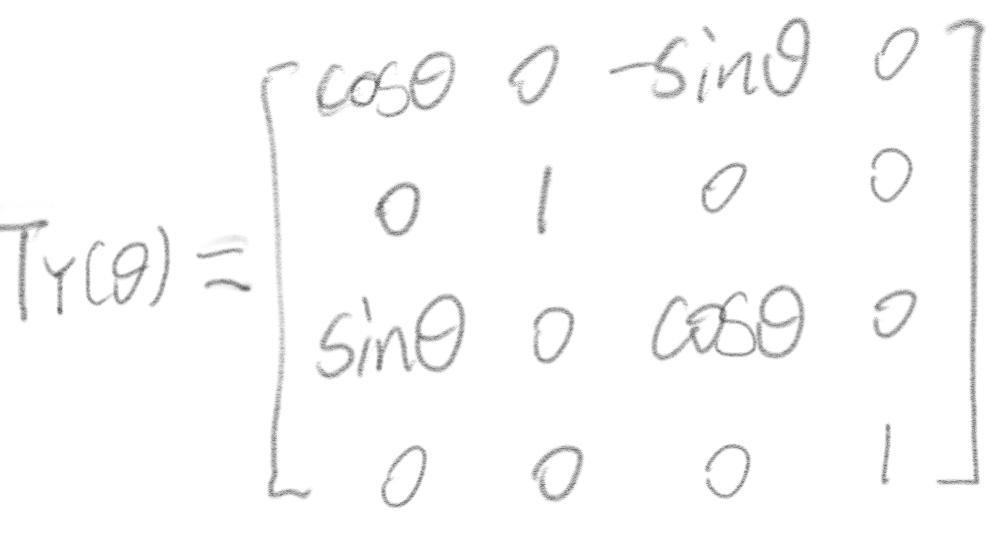
So we can get the following conclusions about rotations about x-axis, y-axis and z-axis independently.
Rotate about z-axis by the angle theta.
Verification:
So we can get the following conclusions about rotations about x-axis, y-axis and z-axis independently.
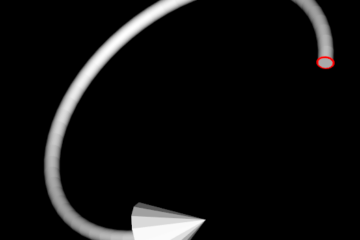
We can use vtkParametricTorus to construct a curved 3D arrow. However, during this process, the opening needs to be closed, and the boundary should be preprocessed: merge nearby points, remove duplicate points, and triangulate. RotationArrow.h Read more…
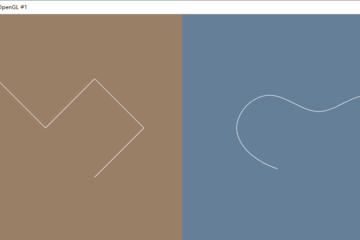
Uniform Cubic Spline To Smooth Segments Change input points and use the Cubic piecewise function introduced in Basic functions for B-Spline to create smooth curve. The left renderer shows polygon lines through original points, and Read more…

Uniform Cubic Spline Piecewise function: The cubic spline graph: Test code: #include <vtkActor.h> #include <vtkCleanPolyData.h> #include <vtkDistancePolyDataFilter.h> #include <vtkNamedColors.h> #include <vtkNew.h> #include <vtkPointData.h> #include <vtkPolyDataMapper.h> #include <vtkPolyDataReader.h> #include <vtkProperty.h> #include <vtkRenderWindow.h> #include <vtkRenderWindowInteractor.h> #include <vtkRenderer.h> Read more…
{kind=link}