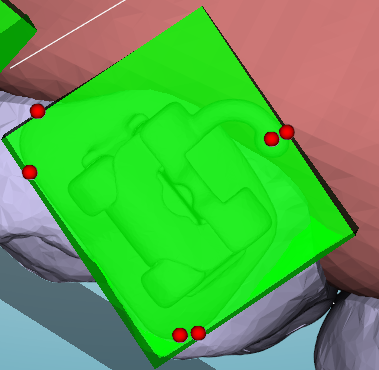
The post shows how to generate an oriented bounding box based on the three axis known in advance.
The 3D model is displayed by a CUModel object. We will calculate the two farthest points, positive farthest point and negative farthest point along the special direction. Then generate a polydata from the six farthest points.
Attention should be paid to the determination of the center point when we create polydata from the six points.
void GetOBBBox(CUModel *model, vtkSmartPointer<vtkPolyData> result)
{
// we have three directions as axes. PointStruct xDir, yDir, zDir;
PointStruct boundPts[6];
// -x, x, -y, y, -z, z
CalculateFarPoints( boundPts[1], boundPts[0], xDir, model );
CalculateFarPoints( boundPts[3], boundPts[2], yDir, model );
CalculateFarPoints( boundPts[5], boundPts[4], zDir, model );
// compute the polyData center
PointStruct center( (boundPts[0]+boundPts[1])*0.5 );
vSPNew( plane, vtkPlane );
plane->SetOrigin( center.point );
plane->SetNormal( xDir.point );
PointStruct tmp = (boundPts[2]+boundPts[3])*0.5;
plane->ProjectPoint( tmp.point, center.point ); // x mid, y mid.
tmp = (boundPts[4]+boundPts[5])*0.5;
vSPNew( plane1, vtkPlane );
plane1->SetOrigin( tmp.point );
plane1->SetNormal( zDir.point );
plane1->ProjectPoint( center.point, center.point ); // x mid, y mid, z mid.
// generate polyData
PointStruct sizeVec[3] = { (boundPts[1] - boundPts[0])*0.5, (boundPts[3] - boundPts[2])*0.5, (boundPts[5] - boundPts[4])*0.5 };
PointStruct pts[8] = {
center - sizeVec[0] - sizeVec[1] - sizeVec[2],
center + sizeVec[0] - sizeVec[1] - sizeVec[2],
center + sizeVec[0] + sizeVec[1] - sizeVec[2],
center - sizeVec[0] + sizeVec[1] - sizeVec[2],
center - sizeVec[0] - sizeVec[1] + sizeVec[2],
center + sizeVec[0] - sizeVec[1] + sizeVec[2],
center + sizeVec[0] + sizeVec[1] + sizeVec[2],
center - sizeVec[0] + sizeVec[1] + sizeVec[2],
};
vSPNew( points, vtkPoints );
for( auto pt: pts )
{
points->InsertNextPoint( pt.point );
}
vSPNew( cells, vtkCellArray );
vtkIdType bottom_ptIds1[3] = { 1, 0, 2 };
cells->InsertNextCell( 3, bottom_ptIds1 );
vtkIdType bottom_ptIds2[3] = { 3, 2, 0 };
cells->InsertNextCell( 3, bottom_ptIds2 );
vtkIdType top_ptIds1[3] = { 4, 5, 6 };
cells->InsertNextCell( 3, top_ptIds1 );
vtkIdType top_ptIds2[3] = { 6, 7, 4 };
cells->InsertNextCell( 3, top_ptIds2 );
vtkIdType left_ptIds1[3] = { 4, 3, 0 };
cells->InsertNextCell( 3, left_ptIds1 );
vtkIdType left_ptIds2[3] = { 3, 4, 7 };
cells->InsertNextCell( 3, left_ptIds2 );
vtkIdType right_ptIds1[3] = { 2, 6, 5 };
cells->InsertNextCell( 3, right_ptIds1 );
vtkIdType right_ptIds2[3] = { 2, 5, 1 };
cells->InsertNextCell( 3, right_ptIds2 );
vtkIdType front_ptIds1[3] = { 1, 4, 0 };
cells->InsertNextCell( 3, front_ptIds1 );
vtkIdType front_ptIds2[3] = { 5, 4, 1 };
cells->InsertNextCell( 3, front_ptIds2 );
vtkIdType back_ptIds1[3] = { 7, 6, 2 };
cells->InsertNextCell( 3, back_ptIds1 );
vtkIdType back_ptIds2[3] = { 7, 2, 3 };
cells->InsertNextCell( 3, back_ptIds2 );
result->SetPoints( points );
result->SetPolys( cells );
result->BuildCells();
result->BuildLinks();
result->Modified();
}
void CalculateFarPoints
(
PointStruct &posPt,
PointStruct &negPt,
PointStruct axis,
CUModel *model
)
{
auto data = model->Getm_Actor()->GetInputPolyData();
data->ComputeBounds();
auto bds = data->GetBounds();
PointStruct center( (bds[0]+bds[1])/2, (bds[2]+bds[3])/2, (bds[4]+bds[5])/2 );
vSPNew( computePlane, vtkPlane );
computePlane->SetOrigin( center.point );
computePlane->SetNormal( axis.point );
double maxValue = VTK_DOUBLE_MIN;
double minValue = VTK_DOUBLE_MAX;
PointStruct posFarPt(0, 0, 0), negFarPt(0, 0, 0);
for( int i = 0; i < data->GetNumberOfPoints(); ++i )
{
PointStruct pt( data->GetPoint( i ) );
double computeValue = computePlane->EvaluateFunction( pt.point );
if( computeValue > maxValue )
{
maxValue = computeValue;
posFarPt = pt;
}
if( computeValue < minValue )
{
minValue = computeValue;
negFarPt = pt;
}
}
LOG( INFO, "maxValue: ", maxValue, ", minValue: ", minValue );
posPt = center + maxValue*axis;
negPt = center + minValue*axis;
}



{kind=link}